
تصور کنید در یک کارخانه بزرگ، بازوهای آهنی با سرعتی خیرهکننده و دقتی مینیاتوری درحال حرکت هستند؛ یکی مانند دست انسان قطعات را جابهجا میکند و دیگری با سرعت برقآسا بستهبندیها را چیدمان میکند؛ اما چهچیزی تعیین میکند که یک ربات بتواند در فضایی تنگ مانور دهد یا باری چند تنی را بلند کند؟ پاسخ در «پیکربندی» نهفته است. انتخاب درست پیکربندی رباتیک، مرز بین یک خط تولید هوشمند و یک سیستم ناکارآمد را مشخص میکند.
در ادامه این مقاله از تی اس ویژن، به معرفی ۶ مورد از انواع رباتها بر اساس پیکربندی آنها خواهیم پرداخت. از دنیای دقیق رباتهای کارتزین تا سرعت شگفتانگیز رباتهای دلتا سفر خواهیم کرد تا با کالبدشکافی مهندسی این ماشینهای هوشمند، بهترین انتخاب را برای صنعت خود بشناسید. برای انتخاب بهترین گزینه، شما را به مطالعه جزئیات این ساختارهای شگفتانگیز و مقایسه کاربردی آنها دعوت میکنیم.
پیکربندی رباتیک چیست؟
فهرست مطالب
پیکر بندی رباتیک در واقع به چیدمان فیزیکی و هندسی قطعات سختافزاری یک ربات اشاره دارد. وقتی از پیکربندی ربات صحبت میکنیم، منظورمان نحوه قرارگیری اعضای صلب (لینکها) در کنار مفاصل است. این آرایش دقیق، تعیینکننده اصلی «سینماتیک» یا همان الگوهای حرکتی ممکن برای ربات است. به زبان ساده، نوع اتصال این قطعات مشخص میکند که ربات تا چه حد میتواند در فضای اطراف خود مانور دهد.
بررسی انواع رباتها بر اساس پیکربندی
براساس ساختار مکانیکی و سیستم مختصات، پیکربندی رباتهای صنعتی به دستههای مختلفی تقسیم میشوند. برای مقایسه سریع انواع رباتها بر اساس پیکربندی میتوانید جدول زیر را مشاهده کنید:
| نوع پیکربندی ربات | نوع حرکت و مفاصل | هندسه فضای کاری | مزایا و ویژگیهای کلیدی | کاربردهای رایج |
| کارتزین (Cartesian) | ۳ مفصل خطی (X, Y, Z) | مکعب مستطیلی | دقت بسیار بالا، صلبیت زیاد، حمل بارهای سنگین | CNC، پرینت سهبعدی، Pick and Place |
| استوانهای (Cylindrical) | ۲ مفصل خطی و ۱ مفصل چرخشی | استوانهای | دسترسی عمودی خوب، ساختار مستحکم | مونتاژ قطعات، بارگیری ماشینآلات |
| کروی / قطبی (Spherical) | ۱ مفصل خطی و ۲ مفصل چرخشی | کروی | دسترسی طولانی در افق، ساختار بازویی ساده | ریختهگری، جوشکاری نقطهای، جابجایی سنگین |
| بازوی مفصلی (Articulated) | حداقل ۳ مفصل چرخشی | کروی (بسیار منعطف) | بیشترین انعافپذیری، شبیه بازوی انسان | رنگپاشی، جوشکاری پیچیده، خودروسازی |
| اسکارا (SCARA) | ۲ مفصل چرخشی موازی و ۱ خطی | استوانهای وسیع | سرعت بسیار بالا، دقت در صفحه افقی | بستهبندی، جایگذاری قطعات الکترونیک |
| دلتا / موازی (Delta) | بازوهای موازی با پایه مشترک | گنبد شکل | سریعترین نوع ربات، شتاب فوقالعاده | بستهبندی سریع، تفکیک روی نوار نقاله |
در ادامه این بخش، به بررسی جزئی هرکدام از این رباتها پرداختهایم.
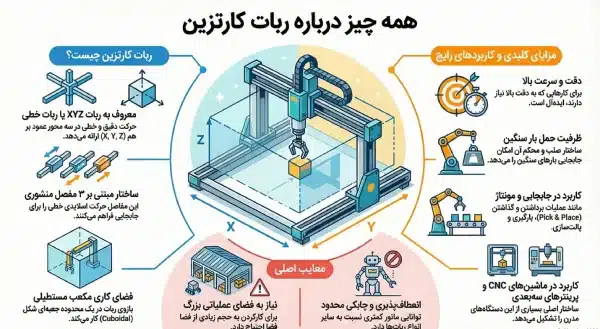
۱. ربات کارتزین یا دکارتی
ربات کارتزین که با نامهای ربات خطی، دکارتی یا دروازهای (Gantry) نیز شناخته میشود، از سه مفصل منشوری استفاده میکند که حرکات کاملا خطی و عمود بر هم را در محورهای X، Y و Z فراهم میکنند. این پیکربندی ربات بهدلیل ساختار بسیار صلب و مستحکم، توانایی حمل بارهای بسیار سنگین را با دقت و سرعت بالا دارد. همچنین بهدلیل سادگی در برنامهریزی و هزینه نگهداری پایین، یکی از محبوبترین گزینهها در صنایع محسوب میشود.
در کاربردهای عملی، پیکربندی رباتیک کارتزین ستون فقرات دستگاههایی مانند پرینترهای سهبعدی، ماشینهای CNC و خطوط جابجایی مواد (Pick and Place) است. قابلیت سفارشیسازی بالای این رباتها به سازندگان اجازه میدهد تا طول بازوها و دقت حرکت را دقیقا براساس نیاز خط تولید تنظیم کنند. این رباتها برای کارهایی که نیاز به حرکت در یک فضای مکعبی دارند، مانند پالتسازی یا آببندی قطعات، بهترین کارایی را از خود نشان میدهند.
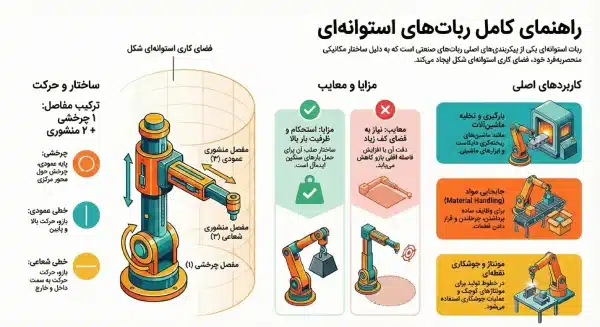
۲. ربات استوانهای
پیکربندی ربات استوانهای از ترکیب یک مفصل چرخشی در پایه و دو مفصل خطی (منشوری) عمود بر هم تشکیل شده است. در این ساختار، بازو میتواند بهصورت عمودی بالا و پایین برود، به شکل شعاعی از ستون مرکزی دور یا نزدیک شود و کل مجموعه نیز حول محور پایه بچرخد. این نوع آرایش، فضای کاری بهشکل استوانه ایجاد میکند که به طراحان اجازه میدهد با اشغال کمترین فضای کف، به محیط اطراف ربات دسترسی مناسبی داشته باشند.
از نظر عملیاتی، پیکر بندی رباتیک استوانهای بهدلیل صلبیت مکانیکی بالا، برای جابجایی بارهای سنگین و انجام وظایف تکراری بسیار مناسب است. این رباتها اغلب در کاربردهایی مانند بارگیری و تخلیه ماشینآلات، جوشکاری نقطهای و مونتاژ قطعات کوچک به کار گرفته میشوند. سادگی در نصب و استفاده، در کنار بهرهوری بالا در فضاهای محدود، از مزایای اصلی این رباتهاست؛ هرچند باید توجه داشت که با افزایش طول بازو در جهت افقی، ممکن است دقت حرکت آنها تا حدی کاهش یابد.
۳. ربات کروی یا قطبی
پیکربندی ربات کروی که با نام «مختصات قطبی» نیز شناخته میشود، از یک بازوی کشویی (مفصل خطی) روی پایهای با دو مفصل چرخشی تشکیل شده است. در این چیدمان، ربات میتواند به دور پایه بچرخد، بازو را حول یک محور افقی به بالا و پایین حرکت دهد و بازوی اصلی را بهسرعت به داخل یا خارج هدایت کند. این ترکیب حرکتی، فضای کاری وسیع و گنبدیشکلی ایجاد میکند که معمولا بزرگتر از فضاهای کاری کارتزین یا استوانهای است.
بارزترین ویژگی در پیکر بندی رباتیک کروی، توانایی دسترسی طولانی در جهت افقی و امکان جابجایی اشیاء روی زمین است. به همین دلیل، این رباتها گزینهای ایدهآل برای بارهای سنگین، عملیات ریختهگری، جوشکاری نقطهای و قالبگیری تزریقی هستند. هرچند این رباتها دسترسی عمودی محدودی دارند و ساختار پیچیدهتر آنها ممکن است با افزایش طول بازو، منجر به کاهش اندک دقت در حرکات شعاعی شود.

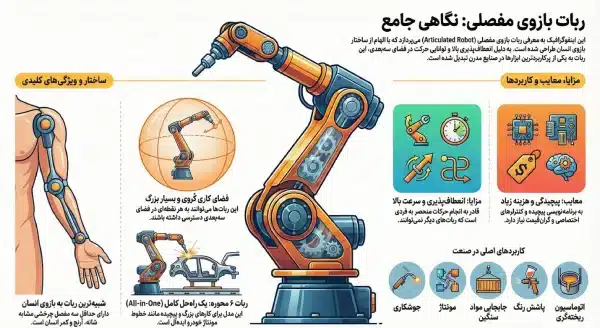
۴. ربات بازوی مفصلی (۶ محوره)
پیکربندی ربات بازوی مفصلی که اغلب بهعنوان رباتهای ۶ محوره شناخته میشوند، شبیهترین ساختار را به بازوی انسان دارند. این رباتها دارای حداقل سه مفصل چرخشی هستند که نقشی مشابه کمر، شانه و آرنج انسان را ایفا میکنند. بهدلیل وجود این مفاصل دورانی متوالی، ربات میتواند در فضای سهبعدی به هر نقطهای دسترسی پیدا کرده و برخلاف سایر مدلها، اجسام را بهراحتی از یک صفحه حرکتی به صفحه دیگر (مثلا از روی کمد به داخل جعبه) منتقل کند.
در حوزه صنعت، پیکر بندی رباتیک مفصلی بهدلیل انعطافپذیری و چابکی فوقالعاده، انتخاب اول برای کارهای پیچیده است. از جوشکاریهای ظریف و پاشش رنگ گرفته تا نصب قطعات بزرگ مانند صندلی خودرو در خطوط مونتاژ، همگی بر عهده این بازوهای قدرتمند هستند.
۵. ربات اسکارا (SCARA)
ربات اسکارا (Selective Compliance Assembly Robot Arm) نوع خاصی از بازوهای مفصلی است. در این پیکربندی ربات، دو مفصل چرخشی موازی وجود دارند که اجازه میدهند بازو در صفحه افقی (XY) منعطف و سریع حرکت کند؛ درحالیکه در جهت عمودی (محور Z) کاملا صلب و قدرتمند باقی میماند. این ساختار منحصربهفرد، فضای کاری استوانهای وسیعی ایجاد میکند که به ربات اجازه میدهد عملیاتهای مونتاژ ظریف مانند قراردادن پینها در سوراخهای تنگ را بدون گیرکردن و با سرعت بسیار بالا انجام دهد.
در محیطهای صنعتی، پیکر بندی رباتیک اسکارا سریعتر از مدلهای کارتزین و استوانهای عمل میکند. به همین دلیل در خطوط بستهبندی، پالتسازی و صنایع زیستپزشکی بسیار محبوب است. طراحی همهکاره و سازگاری با استانداردهای اتاق تمیز، این ربات را به انتخابی عالی برای جایگذاری دقیق قطعات الکترونیکی تبدیل کرده است. این رباتها با ترکیب حرکات منحنیشکل، مانورپذیری فوقالعادهای در فضاهای کاری شلوغ ارائه میدهند.

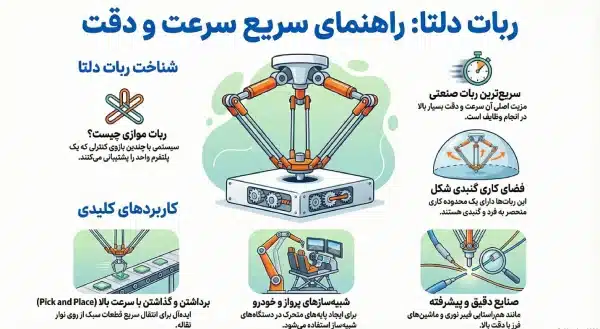
۶. ربات دلتا یا موازی
ربات دلتا که با نام ربات موازی نیز شناخته میشود، از چندین بازوی متصل به یک پلتفرم واحد بهره میبرد که بهصورت زنجیرههای موازی توسط کامپیوتر کنترل میشوند. این پیکربندی ربات برای دستیابی به بالاترین سرعت و دقت ممکن طراحی شده است و سریعترین نوع ربات صنعتی محسوب میشود. رباتهای دلتا فضای کاری منحصربهفردی به شکل گنبد دارند و بهدلیل وزن سبک بازوها، میتوانند با شتابی فوقالعاده عمل کنند.
در دنیای صنعت، پیکر بندی رباتیک دلتا پادشاه عملیاتهای فوقسریع «برداشتن و گذاشتن» (Pick and Place) است. جابجایی محصولات سبک از روی نوار نقالههای سریع و بستهبندی آنها با دقت میلیمتری، تخصص اصلی این رباتهاست. علاوهبر خطوط تولید، از ساختارهای موازی در تجهیزات پیشرفتهای مانند شبیهسازهای پرواز نیز استفاده میشود.
جمعبندی
در نهایت، انتخاب «پیکربندی رباتیک» مناسب، مستلزم توازن میان دقت، سرعت و فضای کاری مورد نیاز است. در حالی که رباتهای کارتزین و استوانهای در جابهجایی بارهای سنگین و فضاهای محدود تخصص دارند، پیکربندیهای مفصلی و اسکارا با انعطافپذیری خود، مرزهای مونتاژ پیچیده را جابهجا کردهاند. همچنین رباتهای دلتا با سرعتی بیرقیب، بهرهوری خطوط بستهبندی را به اوج میرسانند.
درک دقیق این تفاوتهای ساختاری به مهندسان اجازه میدهد تا ماشینی را انتخاب کنند که نهتنها وظایف امروز را به درستی انجام دهد، بلکه بهینهترین مسیر را برای اتوماسیون هوشمند آینده هموار سازد. برای خریدی مطمئن و تضمینی میتوانید از مشاوره تخصصی کارشناسان تی اس ویژن کمک بگیرید. این مجموعه خدمات تخصصی در زمینه رباتهای صنعتی، ازجمله مشاوره، فروش، نصب و راهاندازی و تعمیرات را ارائه میدهد تا به بهینهسازی اتوماسیون کسبوکارها کمک کند. برای دریافت مشاوره تخصصی میتوانید با شماره 36148 25 98+ تماس بگیرید.