
آیا شما هم بهدنبال راهی هستید تا خط تولید رباتیک خود را بدون هیچ توقفی بهینهسازی کنید؟ در عصر شتابدهنده فناوری، توقف و ریسککردن برای برنامهریزی یک ربات، دیگر منطقی به نظر نمیرسد. نرمافزار شبیهسازی یاسکاوا MotoSim EG-VRC پاسخی قدرتمند به این نیاز حیاتی فراهم میکند. این ابزار پیشرفته، یک دوقلوی دیجیتال از سلول رباتیک شما در محیط کامپیوتر ایجاد میسازد.
شما میتوانید در این محیط مجازی، برنامهنویسیهای پیچیده را انجام دهید و جانمایی تجهیزات را به بهترین شکل ممکن بهینهسازی کنید. این مقاله بهطور کامل نشان میدهد که چگونه yaskawa motosim EG-VRC با قابلیتهای منحصربهفردش، کارایی خط تولید شما را متحول میسازد. اگر میخواهید با صرفهجویی در زمان و هزینه، به سطح جدیدی از دقت و بهرهوری در پروژههای رباتیک خود دست پیدا کنید، مطالعه ادامه این مقاله جذاب را از دست ندهید.
نرمافزار شبیهسازی یاسکاوا MotoSim EG-VRC چیست؟
فهرست مطالب
نرمافزار MotoSim EG-VRC یک ابزار شبیهسازی بسیار قدرتمند است که توسط شرکت یاسکاوا (Yaskawa) طراحی شده است. این برنامه برای اهداف مهمی مانند برنامهنویسی آفلاین، شبیهسازی سهبعدی و کنترل مجازی رباتها کاربرد دارد.
در اصل، این نرمافزار نقش یک مدل دیجیتال از سلول رباتیک را در رایانه ایفا میکند. کاربران بدون نیاز به راهاندازی فیزیکی ربات میتوانند تمام فرآیند برنامهریزی، شبیهسازی و ارزیابی را در یک محیط مجازی انجام دهند.
قابلیتهای کلیدی نرمافزار yaskawa motosim EG-VRC
نرمافزار MotoSim EG-VRC بهعنوان یک سیستم قدرتمند برای برنامهنویسی آفلاین و شبیهسازی شناخته میشود. این ابزار قابلیتهای متنوعی را در دستههای مختلف برای مدیریت سیستمهای رباتیک ارائه میدهد که در ادامه بررسی میشوند.
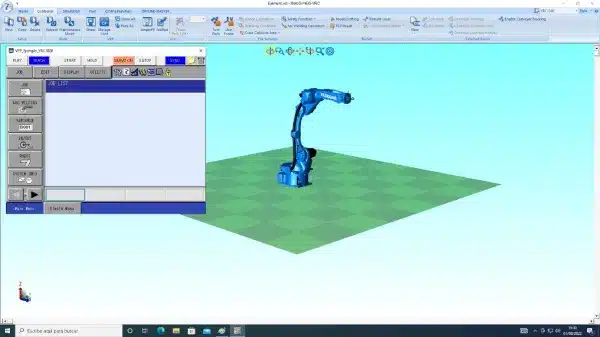
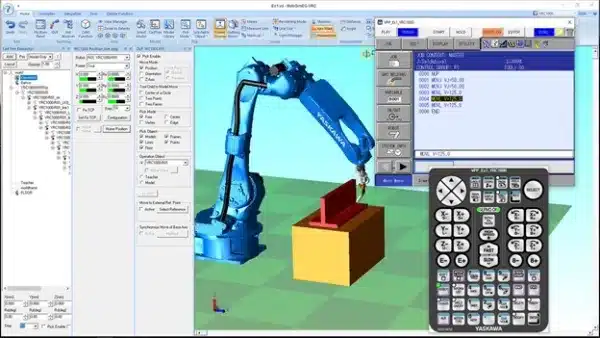
شبیهسازی کنترلر و برنامهنویسی آفلاین (VRC)
MotoSim EG-VRC امکان شبیهسازی کامل کنترلر واقعی ربات را فراهم میکند. یعنی میتوانید با همان زبان برنامهنویسی INFORM و همان ساختار سیستم واقعی، برنامهتان را بنویسید و تست کنید. حتی نیازی به توقف خط تولید هم نیست؛ چون برنامههای آفلاین بدون کامپایل مستقیما به کنترلر واقعی منتقل میشوند.
از طریق شبکه، امکان اتصال و دسترسی ازراهدور به کنترلر هم فراهم است. همچنین پدال آموزش واقعی (Teach Pendant) و فایلهای Condition در نرمافزار بازسازی میشوند.
ابزارهای تحلیل، شبیهسازی و بهینهسازی
MotoSim EG-VRC مجموعهای از ابزارهای دقیق برای تحلیل چیدمان، مسیر حرکت ربات و عملکرد کلی سیستم دارد. با این نرمافزار میتوانید برخوردها را تشخیص دهید (Collision Detection)، میزان دسترسی ربات به نقاط را بررسی (Reach Analysis) و حتی زمان چرخه تولید را محاسبه کنید.
مسیرهای حرکتی بهصورت تصویری قابلمشاهده و بررسی هستند و به کمک ابزار Visual Path میتوانید مراحل کاری ربات را شبیهسازی کنید. نقاط عملکردی مانند تایمرها را هم میتوان بهسادگی به مسیر برنامه اضافه کرد.
پشتیبانی از مدلهای CAD/CAM
این نرمافزار بهراحتی از مدلهای سهبعدی CAD پشتیبانی میکند. فایلهایی مثل SolidWorks یا CATIA را میتوانید مستقیما وارد کنید، بدون اینکه نیاز به تبدیل فرمت باشد. مسیر حرکت ربات میتواند بهطور خودکار براساس لبهها یا سطوح قطعه تعریف شود و پارامترهای موردنظر توسط کاربر قابلتنظیم هستند. خروجی شبیهسازی هم بهشکل PDF سهبعدی یا فایل ویدئویی ذخیره میشود. مدلهای کاربری شما نیز میتوانند به کتابخانه یاسکاوا افزوده شوند.
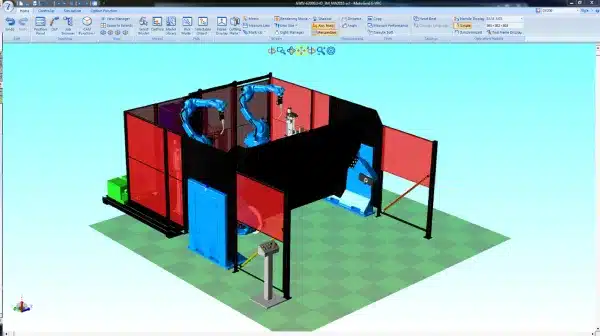
شبیهسازی چند ربات و چند محور
شبیهسازی همزمان چند ربات یا کنترلر در MotoSim EG-VRC بهراحتی انجام میشود. میتوانید حرکات سنکرون میان رباتها و محورهای خارجی را مدیریت کنید. تجهیزات جانبی مثل پوزیشنر، ترک و گنتری هم قابل شبیهسازی هستند.
ابزارهای اشکالزدایی و ایمنی
این نرمافزار ابزارهایی برای خطایابی دقیق در اختیار شما میگذارد. میتوانید نقاط توقف، نشانکها و مانیتور وضعیت متغیرها را تعریف کنید. پیکربندی مناطق ایمنی (FSU) هم از طریق رابط گرافیکی ممکن است. ویرایشگر متنی داخلی (JobPad) به شما کمک میکند تا برنامهها را بنویسید و سینتکس کد را بررسی کنید.
اتصال و ادغام با سیستمها
از طریق شبکه اترنت، امکان تبادل اطلاعات با کنترلر واقعی فراهم است و حرکات ربات بهصورت بلادرنگ قابلمشاهده خواهد بود. علاوهبراین، با استفاده از پلاگین WinMOD MS200، میتوان رباتهای برنامهریزیشده را در محیط WinMOD شبیهسازی کرد و آنها را با کنترلرهای واقعی یا مجازی تست نمود. همچنین، ارتباط کامل بین PLC، ربات و تجهیزات جانبی آن برقرار میشود.
مزایای استفاده از یاسکاوا MotoSim EG-VRC
استفاده از نرمافزار MotoSim EG-VRC منافع زیادی را برای کاربران بههمراه میآورد. این مزایا عمدتا روی کم کردن زمانهای غیرمولد و بالابردن کارایی و دقت در هنگام برنامهنویسی و راهاندازی سیستمهای رباتیک تمرکز دارد.
صرفهجویی در زمان و هزینه
MotoSim EG-VRC کمک میکند تا زمانهای راهاندازی، تنظیمات و تست به حداقل برسند. زمانهای غیرمولد یا Downtime بهشدت کاهش مییابند و در نتیجه، بهرهوری خط تولید بالا میرود.
افزایش دقت و بهرهوری
باتوجهبه شبیهسازی دقیق مسیر حرکت ربات و ابزارهای تحلیلی موجود، دقت برنامهها بالا میرود. حتی میتوان برنامههای فعلی را بدون توقف تولید، بهینهسازی کرد و برای قطعات جدید، پیشاز ورود به فاز تولید، برنامه نوشت.
برنامهنویسی آفلاین پیشرفته
تمام مراحل برنامهنویسی میتواند در محیطی امن و بدون نیاز به سختافزار فیزیکی انجام شود. این یعنی پیشاز خرید یا نصب ربات، میتوانید از صحت عملکرد اطمینان پیدا کنید.
سازگاری و انعطافپذیری بالا
پشتیبانی از چند ربات، چند کنترلر و تجهیزات جانبی مختلف باعث شده تا این نرمافزار ابزار قدرتمندی برای توسعه و تست پروژههای پیچیده باشد.
ادغام با WinMOD
قابلیت ادغام با WinMOD، امکان شبیهسازی دقیق سیستمهای اتوماسیون و تست مجازی فراهم میکند. سیگنالها بین ربات، PLC و ابزارهای جانبی رد و بدل میشوند و یک مدل دیجیتال کامل از سیستم ساخته میشود.
کاربردهای نرمافزار MotoSim EG-VRC
نرمافزار MotoSim EG-VRC برای پشتیبانی و بهینهسازی فرآیندی در سیستمهای ربوتیک یاسکاوا مورد استفاده قرار میگیرد. برخی از مهمترین کاربردهای صنعتی و مهندسی نرمافزار شبیهسازی یاسکاوا MotoSim EG-VRC توضیح داده شده است.
کاربردهای صنعتی
MotoSim EG-VRC از تعداد زیادی از کاربردهای صنعتی که رباتهای یاسکاوا در آنها تخصص دارند، پشتیبانی میکند:
- جوشکاری: جوشکاری قوسی (Arc welding) و جوش نقطهای (Spot welding) با استفاده از این نرمافزار شبیهسازی میشوند.
- جابجایی و هندلینگ: فرآیندهای هندلینگ و توزیع (Dispensing) بهطور کامل مدیریت میشوند.
- پاشش و رنگآمیزی: فرآیند نقاشی و پاشش نیز در محیط مجازی اجرا میگردد.
- برش: انواع عملیات برش، تریمکردن یا ارهکردن شبیهسازی میشوند.
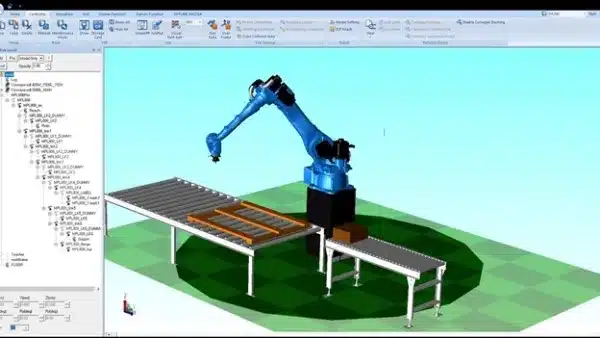
- پالتسازی: فرآیندهای پالتسازی و برداشتن از پالت بهینهسازی میشوند.
سرویسدهی ماشین (Machine Tending)، مونتاژ مکانیکی و بازرسی کیفیت (Quality Inspection) نیز توسط yaskawa motosim EG-VRC پشتیبانی میشوند.
کاربردهای مهندسی و شبیهسازی
اصلیترین کاربرد MotoSim EG-VRC در برنامهنویسی آفلاین و استفاده از قابلیتهای کنترلی مجازی برای تحلیل سیستم است. سایر کاربردهای مهندسی موتوسیم EG-VRC به این شرح است:
- تحلیل جانمایی سلول و بررسی دسترسی تجهیزات
- بررسی برخورد و مسیر حرکت ربات
- تولید مسیر خودکار بر اساس مدل قطعه
- پیکربندی ایمنی و کنترل مجازی سیستم
- برنامهنویسی و اصلاح مسیرها با کمترین تلاش
- خطایابی و دیباگ با ابزارهای پیشرفته
کاربردهای توسعه پروژه و تست مجازی
این نرمافزار بهعنوان یک ابزار پشتیبانی در توسعه پروژهها عمل میکند و کاربردهای زیر را دارد:
- تست و شبیهسازی کاربردهای جدید
- دسترسی از راه دور به کنترلر و مشاهده بلادرنگ حرکات ربات
با yaskawa motosim EG-VRC پروژههای رباتیک خود را هوشمندانه اجرا کنید
نرمافزار شبیهسازی یاسکاوا MotoSim EG-VRC چیزی فراتر از یک نرمافزار شبیهسازی ساده است. این ابزار، به مهندسان، برنامهنویسان و طراحان صنعتی کمک میکند تا پروژههای رباتیک را با دقت بیشتر و هزینه و زمان کمتر اجرا کنند؛ بنابراین اگر بهدنبال یک راهحل کامل برای طراحی، شبیهسازی و راهاندازی رباتهای یاسکاوا هستید، این نرمافزار دقیقا همان چیزیست که به آن نیاز دارید.